Architected First-round Simulation Phase of AlphaPilot Challenge ($1M USD Prize)
FlightGoggles: Photorealistic sensor simulation for perception-driven robotics using photogrammetry and virtual reality
Implement Riemmanian Motion Policies on a Kuka robot
Dynamic Perception-Aware Planning for Avoidance of Human in VR
Published in MIT News in article "Researchers develop virtual-reality testing ground for drones"
In which our research team builds an LCM framework that can powerslide a car between 2 cones using planar LIDAR.
In which our team creates a full navigation stack complete with RRT*.
In which I help teach high school students about robotic navigation and vision techniques including LIDAR potential field and vision contouring.
Engineered a server stress testing tool 2.7+ times more powerful than Akamai’s prior tool; reduced costs of Akamai’s QA team by 8x for large-scale production tests.
Architected a fast, dynamic file generation server that is flexible, easier to use, and 3x faster than Akamai’s previous system.
Co-created a popular, interactive robotic prosthetic arm exhibit at the MIT Museum. On display from June 2015 through September 2017 with ∼200k visitor interactions and 0% interactivity downtime.
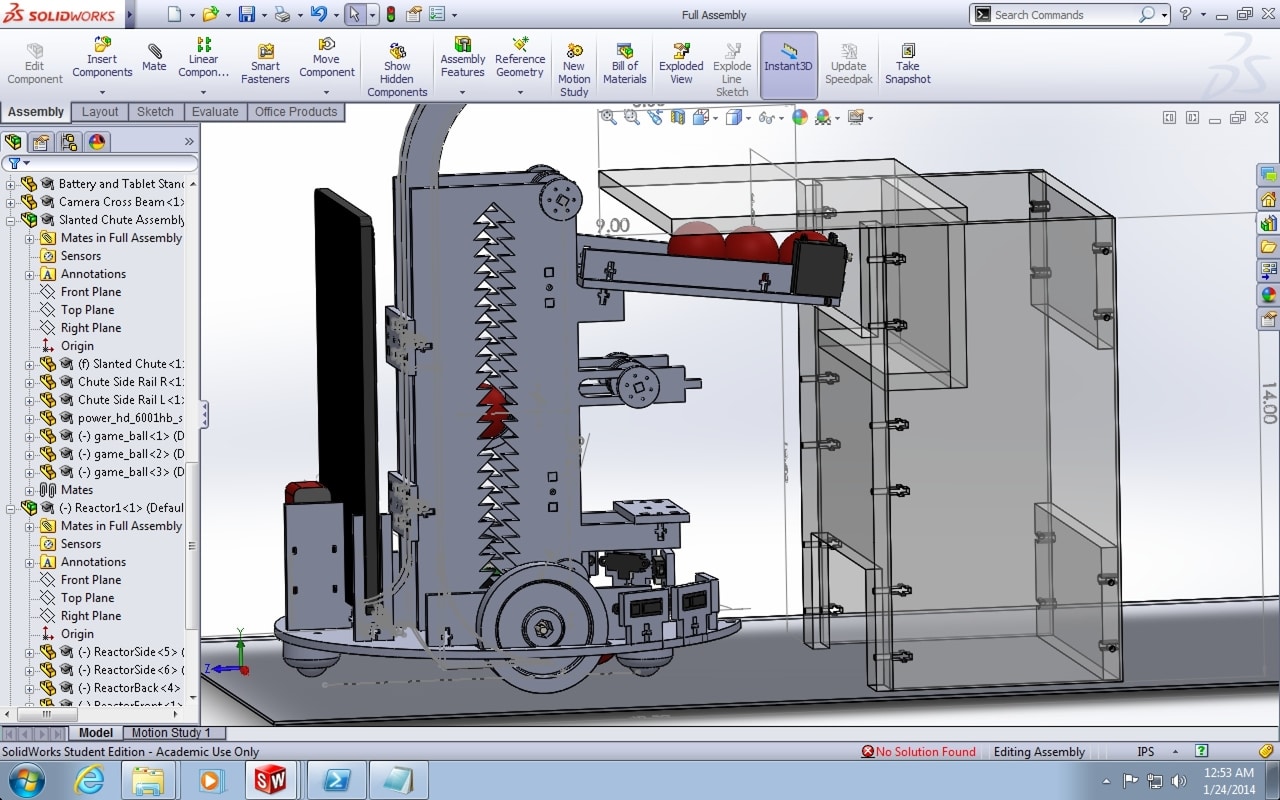
Collaborated in a team of 4 in the MASLAB robotics competition to bring an autonomous robot from concept to functional prototype in 25 days.
©2016 Winter Guerra. All rights reserved.